Difference between revisions of "Notas del grupo de estudio Lidar"
| (27 intermediate revisions by 3 users not shown) | |||
| Line 3: | Line 3: | ||
Platica y aprende con nosotros en: https://gitter.im/OSGeo/Lidar-es | Platica y aprende con nosotros en: https://gitter.im/OSGeo/Lidar-es | ||
| + | == Síntesis de referencias== | ||
| + | |||
| + | |||
| + | == Tesis de licenciatura: Diseño de un sistema LIDAR de bajo costo para generación de mapas topográficos 2005 == | ||
| + | |||
| + | === Capítulo 1. Introducción === | ||
| + | En este capítulo el autor explica que el objetivo de la tesis es diseñar un sistema LIDAR para obtener mapas topográficos. El sistema para tal propósito es una combinación de un GPS, un sistema de navegación inercial independiente de la aeronave y un escáner láser (el dispositivo LIDAR).<br /> | ||
| + | |||
| + | '''1.1 PERCEPCIÓN REMOTA''' | ||
| + | <p> Hay una introducción a la historia de la Percepción Remota, inicia en la década de 1930 con la fotografía área utilizada con fines militares. </p> | ||
| + | |||
| + | '''1.1.1 Fotografía aérea e imágenes de satélite''' | ||
| + | <p>Desde la década de 1950 la fotografía aérea se ha perfeccionado con la creación de la fotogrametría. A partir de 1964 se comenzaron a utilizar otras plataformas, como cohetes, para transportar los sensores.</p> | ||
| + | <p>La figura 1.1 Muestra el de forma sencilla el sistema de percepción remota satelital (pág. 3).</p> | ||
| + | <p>El autor reflexiona acerca de la ventaja económica que representan contar con vehículos aéreos con cámaras fotográficas digitales sobre la percepción remota satelital. </p> | ||
| + | '''1.1.1.1 Fotogrametría y métodos de interpretación''' | ||
| + | El proceso fotogramétrico es básicamente el siguiente:<br /> | ||
| + | # Fotografía aérea: las cuales deben de cumplir con estándares geométricos para poder hacer mapas a partir de ellas, además de cubrir transversal y longitudinalmente de forma secuencial todo el terreno. | ||
| + | # Clasificación de campo: Identificación de elementos fotografiados en campo, como: ríos, poblaciones, carreteras, etc. | ||
| + | # Mediciones en campo: Mediciones con equipo topográfico de elementos en campo que fueron fotografiados, con el fin de darle orientación a los componentes del mapa. | ||
| + | # Cálculos: Obtener, mediante cálculos y procesamientos, la ubicación geográfica de zonas dentro del mapa. | ||
| + | # Restitución o captura de información: Utilizando equipos llamados “restituidores”, se adquiere información geográfica como vías, ríos, etc. Para reconstruir tridimensionalmente el terreno se realiza un traslape del 60% de dos fotografías secuenciales. | ||
| + | # Edición y salidas finales: Colocación de letreros de sitios de interés obtenidos en campo, se añaden retícula de coordenadas, escala e información que haga comprensible e útil el mapa. | ||
| + | # Control de calidad: Se trata de una revisión para cerciorase del cumplimiento de normas y especificaciones técnicas del mapa. | ||
| + | <p>Para contar con una ortofotografía, la cual es obtenida a través de imágenes corregidas geométricamente, compensadas y con escala uniforme en toda su extensión, también se requiere de conocer la ubicación precisa de cada toma (normalmente esto se logra con un GPS), y exige apoyo en campo (ubicación de puntos conocidos sobre el terreno y que serán comparados para corregir errores). También se requiere de un modelo digital de elevación, para compensar diferencias de escala debidas al relieve en el terreno.</p> | ||
| + | '''1.1.1.2. Toma física de fotografías''' | ||
| + | <p>Se requiere que las líneas de vuelo estén orientadas de tal manera que se obtengan fotografías del terreno con una sobreposición de áreas de entre fotogramas subsecuentes del 50% al 65% aproximadamente y entre líneas de vuelo del 30%. Para tal fin el eje de la cámara no puede estar más de 3 grados respecto a la línea cenit-nadir (revisar esta parte).</p> | ||
| + | '''1.1.2 Videografía y fotografía digital de pequeño formato''' | ||
| + | <p>Hasta el momento de la redacción de la tesis, según el autor, se ha venido incrementando el uso de la fotografía digital de pequeño formato, combinando esta tecnología con filtros de interferencia en sectores bien delimitados del espectro electromagnético.</p> | ||
| + | '''1.2. LIDAR''' | ||
| + | <p>LIDAR (LIgth Detection And Ranging o detección de luz para medición de distancias) es un método de percepción remota que se puede utilizar para crear modelos digitales de un terreno en estudio. | ||
| + | Aunque el láser localizado en tierra firme puede asegurar precisiones de hasta un centímetro, al montarlo a un avión la posición de éste se convierte en un factor limitante. Para solucionar este inconveniente se requiere asociar a láser del LIDAR con tecnologías que lo hacen más preciso.</p> | ||
| + | '''1.2.1 Funcionamiento''' | ||
| + | <p> Un LIDAR está constituido por la integración de tres tecnologías:</p> | ||
| + | * Un receptor GPS, proporciona la posición global (X,Y,Z) por medio de un sistema satelital. | ||
| + | * Un Sistema de Navegación Inercial (SIN), proporciona la orientación de un objeto respecto a un marco de referencia inercial, utilizando acelerómetros y giróscopos. | ||
| + | * Un escáner láser de lata velocidad, mide la distancia desde el escáner hasta el punto distante. | ||
| + | <p>Además, una computadora que sincroniza procesa y almacena la información de los tres elementos. Así cada pulso láser tiene conocida la posición exacta del punto que golpeó en el suelo. </p> | ||
| + | <p>La figura 1.4 muestra un esquema de funcionamiento de un sistema LIDAR </p> | ||
| + | '''1.2.2 Aplicaciones''' | ||
| + | <p>La exploración aérea con láser compite fuertemente con la fotogrametría en las siguientes aplicaciones:</p> | ||
| + | * Líneas eléctricas de potencia. Con el láser se localizan puntos sobre la catenaria y en el suelo. | ||
| + | * Litorales. Cartografía de los litorales. | ||
| + | * Zonas forestales. Para explorar el suelo y recibir múltiples retornos de los diferentes niveles del dosel, con esto se pude medir al mismo tiempo plantas y terreno, y presentarlos juntos o separados según los requerimientos. | ||
| + | * Pantanos y zonas minadas. Con la tecnología LIDAR no son necesarios puntos de control terrestre salvo para la estación terrestre GPS. | ||
| + | * Modelos urbanos. Para la medición la altura de las edificaciones. | ||
| + | * Batimetría. Se puede estudiar el fondo de lagos o zonas inundadas, se utiliza generalmente el láser verde porque penetra mejor en el agua. | ||
| + | <p>El sistema LIDAR tiene ventajas sobre la fotogrametría debido al corto tiempo de procesamiento, su flexibilidad y eliminación de cobertura con estereo-imágenes.</p> | ||
| + | '''1.3 SISTEMA LÁSER''' | ||
| + | <p>En el LASER (Light Amplification by Stimulated Emission of Radiation) las longitudes de onda de la radiación incluyen las regiones ultravioleta (180 y 400 [nm]), visible (400 y 700 [nm]) e infrarroja 700 [nm] y 1 [mm]. Los rayos láser pueden ser producidos por efectos fotoquímicos, térmicos o mecánicos.</p> | ||
| + | <p>Los sistemas LIDAR emiten un pulso de luz cuyo reflejo sobre los objetos es detectado por un sensor y almacenado. El receptor capta el retorno antes de la emisión del siguiente pulso. </p> | ||
| + | <p>La divergencia de un rayo láser es baja así que el ancho del pulso es constante por más tiempo y de igual forma su potencia.</p> | ||
| + | '''1.4 SISTEMA DE POSICIONAMIENTO GLOBAL (GPS)''' | ||
| + | <p>En 1978 el Departamento de Defensa de los Estados Unidos decide implementar el Sistema de Posicionamiento Global (GPS). Compuesto por 24 satélites con capacidad de realizar medidas con menos de un centímetro de precisión. </p> | ||
| + | '''1.4.1 GPS Diferencial''' | ||
| + | <p> Es un método para corregir los errores en el sistema GPS básico, elevando significativamente su precisión. Este método se vale de la utilización de dos receptores: el de referencia (estacionario y del cual se conoce exactamente su posición) y el móvil (el receptor del cual se quiere saber su posición). </p> | ||
| + | <p>Los receptores requieren de recibir señales de sincronización de al menos cuatro satélites para establecer su posición. Estas señales tienen un pequeño retraso debido a los obstáculos que se encuentren en su camino. Las señales sincronizadas tienen un pequeño error, por lo tanto la posición calculada a partir de ellas tendrá una composición de esos errores. Con el GPS diferencial contamos con un receptor de referencia que mide los errores de sincronización. Este receptor transmite mensajes de corrección hacia los receptores de alrededor. </p> | ||
| + | <p>El receptor de referencia recibe la misma información que los receptores móviles, pero utiliza el conocimiento de su posición para calcular cuál debería ser el tiempo de viaje de las señales y lo compara con la sincronización de las señales que recibe. La diferencia en tiempo da pie al cálculo de un mensaje de corrección, que luego transmite hacia posibles receptores móviles para corregir sus mediciones. </p> | ||
| + | '''1.4.2 WAAS''' | ||
| + | <p>El WAAS (Wide Area Augmentation System) es un sistema desarrollado por la Administración Federal de la Aviación y el Departamento de Transporte de los Estados Unidos. Está compuesto por un sistema de satélites y 25 estaciones terrestres, provee correcciones a la señal GPS, mejorando hasta 5 veces la precisión de la posición calculada. Un receptor que con capacidad de recibir esta información puede dar una precisión de menos de tres metros el 95 % del tiempo sin pago por cuotas de servicio. El objetivo es corregir los errores de las señales GPS causadas por la ionósfera y sincronización de errores orbitales. </p> | ||
| + | '''1.5 SISTEMAS DE NAVEGACIÓN INERCIAL (SIN)''' | ||
| + | <p>Para navegar, es decir dirigir un vehículo de un lugar a otro, se requieren saber casi en cualquier momento de la posición y la velocidad del vehículo. A partir de estos dos datos podremos conocer el rumbo y modificarlo para llegar al punto deseado. Si conocemos los valores iniciales de posición y la velocidad podemos utilizar instrumentos que miden la aceleración lineal (acelerómetros) y la aceleración angular (giróscopos) y así calcular en cada momento la localización del vehículo.</p> | ||
| + | <p>Un Sistema de Navegación Inercial (SIN) es básicamente un arreglo de sensores (giróscopos y acelerómetros) fijos a un marco de referencia, esto es, tres ejes mutuamente perpendiculares que además coinciden con los ejes del vehículo.</p> | ||
| + | <p>Un ejemplo de un sistema de orientación sería:</p> | ||
| + | * Tres giróscopos, que miden la variación de la aceleración angular alrededor de tres los ejes | ||
| + | * Tres acelerómetros, que miden la aceleración lineal del vehículo a lo largo de los mismos tres ejes. | ||
| + | <p>Para localizar el vehículo debemos contar con la posición inicial del vehículo respecto a un marco de referencia fijo (en Tierra). Luego los valores de orientación obtenidos por los sensores deben multiplicarse por una matriz de rotación y así obtener la orientación del vehículo respecto al marco de referencia fijo (en Tierra).</p> | ||
| + | <p>Ver figura 1.9 Diagrama de bloques simplificado de un sistema de navegación inercial. Página 13.</p> | ||
| + | Figura_1_09.jpg|Diagrama de bloques simplificado de un sistema de navegación inercial. | ||
| + | '''1.5.1. Principios de funcionamiento''' | ||
| + | <p>Los sensores inerciales (giróscopo y acelerómetro) hacen uso de las leyes de Newton (en este caso la ley de la inercia): un objeto que se mueve en una dirección tiende a permanecer en movimiento en la misma dirección y un objeto que gira alrededor de un eje tiende a mantener el mismo eje de rotación. Este caso se ejemplifica con un trompo girando sobre un eje vertical, si se golpe al trompo éste se desviará, pero intentará volver a recobrar el eje de giro que tenía antes del impacto.</p> | ||
| + | <p>Imaginemos un vehículo con un eje longitudinal y otro trasversal (estos ejes formarían un plano paralelo al horizonte). Y en él colocamos un giróscopo, el cual consiste en un marco con dos ejes longitudinal y transversal propios, que coinciden con los ejes del vehículo. (Ver Figura 1.10. Giróscopo con partes móviles). El marco está en equilibrio al ser sostenido por dos pivotes sobre el eje longitudinal, colineal con el eje longitudinal del planeador o vehículo. Además, hay una masa gira libremente al rededor del eje trasversal, el cuál es paralelo y/o colineal con el eje transversal del mismo vehículo.</p> | ||
| + | <p>Debido a la fuerza de gravedad, un que gira cerca de la vertical se orientarán hacia la vertical verdadera. Si el vehículo se ladea, esto es, solo el eje longitudinal permanece paralelo al horizonte y el eje trasversal no, como cuando el planeador o avión da vuelta, el mecanismo se inclinará o ladeará junto con el vehículo, pero la masa giratoria permanecerá vertical, es en ese momento cuando se puede medir la velocidad angular de ese eje transversal. En la figura pude verse un resorte que podría servir para medir esa inclinación.</p> | ||
| + | <gallery> | ||
| + | Figura_1_10.jpg|Giróscopo con partes móviles. | ||
| + | </gallery> | ||
| + | <p>Figura 1.10. Giróscopo con partes móviles.</p> | ||
| + | <p>El acelerómetro mecánico simple (ver Figura 1.11) se construye uniendo una masa a un dinamómetro cuyo eje está en la misma dirección que la aceleración que se desea medir. La aceleración que puede medirse puede ser debido al cambio de la velocidad del dispositivo en el espacio, pero también debida al tipo de aceleración asociada con el fenómeno del peso experimentado por una masa de prueba que se encuentra en el marco de referencia del dispositivo. Un ejemplo en el que este tipo de aceleraciones son diferentes es cuando un acelerómetro medirá un valor sentado en el suelo, ya que las masas tienen un peso, a pesar de que no hay cambio de velocidad. Sin embargo, un acelerómetro en caída gravitacional libre hacia el centro de la Tierra medirá un valor de cero, ya que, a pesar de que su velocidad es cada vez mayor, está en un marco de referencia en el que no tiene peso.([https://es.wikipedia.org/wiki/Aceler%C3%B3metro Extracto obtenido del tema "acelerómetro" en Wikipedia]). </p> | ||
| + | <gallery> | ||
| + | Figura_1_11.jpg|Diagrama de un acelerómetro simple. | ||
| + | </gallery> | ||
| + | <p>Figura 1.11. Diagrama de un acelerómetro simple.</p> | ||
| + | '''1.5.2 Plataformas aéreas''' | ||
| + | <p>Las plataformas aéreas sujetan una cámara o sensor al vehículo aéreo.</p> | ||
| + | <p>Idealmente, el eje focal de la cámara al adquirir las imágenes en un vuelo es normal al plano del terreno (horizonte) con el fin de que toda la foto esté a la misma escala y no haya que aplicar correcciones, sin embargo, esta práctica es difícil de lograr debido a las perturbaciones del avión al volar. Por tal motivo se han diseñado plataformas autónomas que, además de permitir que el eje de la cámara sea normal al terreno, están provistas de dispositivos de amortiguamiento para evitar la transmisión de la vibración del avión a la cámara y, cuentan con mecanismos para que la cámara pueda rotar en el azimut y así corregir la deriva (fenómeno causado por los vientos laterales).</p> | ||
| + | <p>Estas plataformas son utilizadas para estabilizar cámaras analógicas o digitales de gran formato, pero igualmente pueden utilizarse para cualquier otro sensor, como es el caso un sistema LIDAR. | ||
| + | Es de suma importancia medir los ángulos en el momento de la adquisición de imágenes, para poder efectuar la corrección geométrica reconstruyendo los parámetros de orientación de la cámara al momento de la toma. Y esta información la obtendremos del sistema de navegación inercial en los tres ejes de rotación, para saber exactamente hacia donde estaba apuntado la aeronave al momento de la emisión de un pulso laser determinado y así poder reconstruir la forma del terreno en estudio. (Ver Figura 1.13)</p> | ||
| + | <gallery> | ||
| + | Figura_1_13.jpg|Ejes de referencia de un areonave. | ||
| + | </gallery> | ||
| + | <p>Figura 1.13. Ejes de referencia de un areonave.</p> | ||
| + | |||
| + | === Capítulo 2. PARTES QUE COMPONEN UN SISTEMA LIDAR === | ||
| + | '''2.1. ESCÁNER LÁSER'''<br /> | ||
| + | |||
| + | '''2.1.1 Principios básicos de láser'''<br /> | ||
| + | |||
| + | '''2.1.2. Tipos de láser'''<br /> | ||
| + | |||
| + | '''2.1.3. Clasificación y seguridad en los equipos láser'''<br /> | ||
| + | |||
| + | '''2.1.4. Medición de distancia con luz láser en un LIDAR'''<br /> | ||
| + | |||
| + | '''2.2. SISTEMA GPS'''<br /> | ||
| + | |||
| + | '''2.2.1 Organización del Sistema de Posicionamiento Global'''<br /> | ||
| + | |||
| + | '''2.2.1.1. Segmento Espacial'''<br /> | ||
| + | |||
| + | '''2.2.1.2. Segmento de Control'''<br /> | ||
| + | |||
| + | '''2.2.1.3. Segmento de Usuario'''<br /> | ||
| + | |||
| + | '''2.2.2. Triangulación y posicionamiento'''<br /> | ||
| + | |||
| + | '''2.2.3. sistema de coordenadas geodésicas'''<br /> | ||
| + | |||
| + | '''2.2.4. Señales manejadas por el GPS'''<br /> | ||
| + | |||
| + | '''2.2.5. El código NMEA'''<br /> | ||
| + | |||
| + | '''2.3. SISTEMA DE NAVECACIÓN INERCIAL (SIN)'''<br /> | ||
| + | |||
| + | '''2.3.1. Marco inercial y sistema de coordenadas fijo a la plataforma'''<br /> | ||
| + | |||
| + | '''2.3.2. Sensores inerciales'''<br /> | ||
| + | |||
| + | '''2.3.2.1. Acelerómetros'''<br /> | ||
| + | |||
| + | '''2.3.2.1.1 Acelerómetros de estado sólido'''<br /> | ||
| + | |||
| + | '''2.3.2.2. Giróscopos'''<br /> | ||
| + | |||
| + | '''2.3.2.2.1. Giróscopo vertical'''<br /> | ||
| + | |||
| + | '''2.3.2.2.1. Giróscopos de estado sólido'''<br /> | ||
| + | |||
| + | '''2.3.2.2.2. Giróscopos láser'''<br /> | ||
| + | |||
| + | == Resumen del Video "Photogrammetry - 3D scan with just your phone/camera" traducido por Vicky Vergara == | ||
| + | https://www.youtube.com/watch?v=ye-C-OOFsX8 | ||
| + | |||
| + | === Fotogrametría === | ||
| + | '''Escaneo 3D con cámara de celular''' | ||
| + | |||
| + | <p> La mayoría de nosotros no tenemos acceso a escáners 3d porque pueden ser bastante caros y además limitados respecto al tamaño de los objetos a escanear. </p> | ||
| + | <p> Para fotogrametría lo unico que se necesita es una cámara y una PC de potencia razonable. </p> | ||
| + | <p>Antes de empezar a tomar fotografías, coloca el objeto de manera que todos los lados puedan iluminados igualmente, evitando crear sombras muy pronunciadas. Rodea el objeto fotografiando todos los ángulos posibles, incluyendo las partes superior e inferior del objeto. </p> | ||
| + | <p> El objeto no debe moverse entre cada toma, ya que el software de fotogrametría buscará características no sólo en el objeto, sino también en el fondo así que las diferencias pueden confundirlo. </p> | ||
| + | <p> Existen muchas opciones en términos de software, sin embargo algunas de ellas son muy caras o limitadas en la versión libre. </p> | ||
| + | |||
| + | <p> En este caso usaremos '''Colmap''', disponible para Windows, Linux y Mac. Para Windows y Mac, se pueden descargar los binarios pre-construidos. En Windows, se encontrarán dos archivos batch dentro de la carpeta descargada: uno de ellos verifica la máquina y confirma que todo está listo para ejecutar Colmap, el otro va a arrancar la aplicación. </p> | ||
| + | * Prepara 2 folders: uno de ellos debe incluir todas tus fotos, el otro será usado como directorio de salida. | ||
| + | * En el menú de Colmap, seleccionar "Reconstruction" -> "Automatic reconstruction". | ||
| + | * Configura el worspace folder, que es el directorio de salida, y el image folder, que es aquél donde has guardado todas tus fotos. | ||
| + | * Cambia la calidad a "Medium" y presiona "Run" | ||
| + | * Esto puede llevar unos minutos, sobre todo si tomaste muchas fotos. | ||
| + | * Colmap mostrará las posiciones estimadas de la cámara y un preview de los puntos del objeto rastreado. | ||
| + | <p> Una vez terminado este proceso en Colmap, podemos crear una retícula imprimible, para lo que usaremos '''Meshlab'''. </p> | ||
| + | * Importa el archivo fused.ply, que encontrarás en el directorio de salida de Colmap. | ||
| + | * Vamos a importar desde el directorio de salida de Colmap, donde se guarda la reconstrucción, el archivo ''fused.ply''. Ahora podemos ver todos los puntos de la reconstrucción. | ||
| + | * Mantendremos sólo los puntos del objeto en cuestión y eliminaremos todo lo demás. En el ejemplo, los otros puntos de contraste son las carecterísticas del cuarto donde tomamos las fotografías. | ||
| + | * Utilicemos el ícono "Seleccionar vértices" en la barra de herramientas y seleccionemos puntos que queremos borrar utilizando la tecla control, después hagamos click en el ícono "Eliminar los vértices". Repetir este proceso hasta quedarnos básicamente sólo con los puntos del modelo que vamos a reconstruir. | ||
| + | * Seleccionamos en el menú "Filters" -> "Remeshing" --> "Screened poisson surface reconstruction". | ||
| + | * Cambiemos la profundidad de la reconstrucción a un valor entre 10 y 15. Pulsa "Apply". Esto tardará un poco en procesar. | ||
| + | * Puedes alternar la visibilidad de los objetos con el ícono de "Ojo" en la esquina superior derecha. | ||
| + | * Si aún luce muy áspero, puedes incrementar el valor de la profundidad de reconstrucción. Entre más alto es el valor, más tiempo tomará hacer la reconstrucción. Llegará un punto, sobre todo arriba del valor 15, en que ya no se podrán obtener mayores detalles. | ||
| + | * Para deshacerse de la forma extraña generada en la parte inferior del modelo, seleccionaremos en el menú la opción "Filters" -> "Selección" --> "Select faces with edges longer than". | ||
| + | * Alterna la vista previa y ajusta el umbral de límite de valores (Edge thresold) hasta cubrir la mayoría de las superficies que quieres eliminar y que están seleccionadas, porque las que quieres conservar NO deben estarlo. | ||
| + | * Después usa el ícono "eliminar superficies" del menú principal. | ||
| + | * Puedes usar la herramienta "seleccionar superficies" de la misma manera que la herramienta "seleccionar vértices" para ir borrando lo innecesario del modelo. | ||
| + | * Puedes suavizar el modelo utilizando el Suavizamiento Laplaciano: en el menú "Filters" -> "Smoothing, fairing and deformation" --> "Laplacian smooth" | ||
| + | * Introduce el valor de suavizamiento deseado (Smoothing steps): usualmente funcionan bien entre 8 y 20. Ten cuidado de suavizar demasiado, se pueden perder detalles valiosos del modelo. | ||
| + | * Ahora estamos listos para exportar la malla (mesh). | ||
| + | * Utiliza PLY o 3DS si quieres mantener mantener la textura, por ejemplo, para publicar el achivo en línea. | ||
| + | * Utiliza STL si sólo deseas salvar la geometría del modelo. | ||
| + | <p> Hacer fotogrametría en objetos brillantes o transparentes es engorroso: puedes pintar o colocarle maskin tape al objeto para darle una apariencia matte y texturizada, de otra forma la reconstruccion no va a ser exitosa. </p> | ||
| + | <p> Las estatuas de piedra son perfectas para fotogrametría, la superficie es áspera y no emiten ninguna reflexión de luz y tienen muchas características pequeñas, que pueden rastrearse y reconstruirse. </p> | ||
| + | <p> El modelo casi siempre va a terminar con un hoyo en la parte inferior, pero es fácil arreglar esto, por ejemplo en Meshmixer, y en ese caso, es mejor cortar el soporte y crear una superficie perfecta para colocar el miodelo en la cama de impresión (revisar antiguos tutoriales sobre Meshmixer). </p> | ||
| + | <p> Estamos listos para rebanar e imprimir nuestro modelo :) </p> | ||
| + | |||
| + | == Instalación de OpenDroneMap == | ||
== referencias == | == referencias == | ||
| + | |||
| + | {| | ||
| + | ! liga | ||
| + | ! tema | ||
| + | ! idioma | ||
| + | ! nivel | ||
| + | ! comentarios | ||
| + | |- | ||
| + | | https://www.youtube.com/watch?v=ye-C-OOFsX8 | ||
| + | | Fotogrametría | ||
| + | | en | ||
| + | | -- | ||
| + | | -- | ||
| + | |- | ||
| + | | https://www.youtube.com/watch?v=Fj0TO4ZKEc0 | ||
| + | | Fotogrametría y Lidar | ||
| + | | en | ||
| + | | intermedio | ||
| + | | Video titulado "GRASS GIS A Point Cloud (LiDAR) Evaluation Resource" | ||
| + | |- | ||
| + | | https://www.youtube.com/watch?v=ELHOjC_V-FE&t=4s | ||
| + | | Fotogrametría | ||
| + | | en | ||
| + | | básico | ||
| + | | Presentación de alunas herramientas para obtener modelos 3D desde un conjunto de fotografías | ||
| + | |- | ||
| + | | http://oreon.dgbiblio.unam.mx/F/IJINDKD554A829XGH26JGLQRS58PCBG8BF6LJRGIUI8GC7GDRG-54726?func=full-set-set&set_number=007762&set_entry=000004&format=999 | ||
| + | | Lidar | ||
| + | | es | ||
| + | | intermedio | ||
| + | | Tesis de licenciatura: Diseño de un sistema LIDAR de bajo costo para generación de mapas topográficos 2005 | ||
| + | |- | ||
| + | | https://www.youtube.com/watch?v=ye-C-OOFsX8 | ||
| + | | fotogrametría | ||
| + | | en | ||
| + | | básico | ||
| + | | Video titulado "Photogrammetry - 3D scan with just your phone/camera" | ||
| + | |- | ||
| + | | https://rapidlasso.com/blog/ | ||
| + | | Lidar y Fotogrametría | ||
| + | | en | ||
| + | | intermedio | ||
| + | | Blog de la herramienta Lastools con ejemplos de uso reales | ||
| + | |- | ||
| + | | https://pdal.io/ | ||
| + | | Lidar | ||
| + | | en | ||
| + | | intermedio | ||
| + | | Sitio web de PDAL con muchos ejemplos prácticos y con datos de muestra para el manejo de nubes de puntos | ||
| + | |- | ||
| + | | http://ulisesmartin.com/2017/04/caminando-hacia-un-dtm-con-software-libre-1/ | ||
| + | | fotogrametría | ||
| + | | es | ||
| + | | básico | ||
| + | | Entrada al blog de Ulimaps sobre obtención de suelo desnudo a partir de una nube de puntos con Lastools | ||
| + | |- | ||
| + | | https://www.asprs.org/divisions-committees/lidar-division/laser-las-file-format-exchange-activities | ||
| + | | Formatos de archivos | ||
| + | | en | ||
| + | | intermedio | ||
| + | | Especificaciones del formato de archivos "LAS" por la "American Society for Photogrammetry and Remote Sensing (ASPRS)" | ||
| + | |- | ||
| + | | https://idecor.cba.gov.ar/satelites-de-10x10-cm-videos-en-linea-y-comprar-los-componentes-para-armar-tu-propio-satelite-actualidad-o-futuro/ | ||
| + | | Formatos de archivos | ||
| + | | es | ||
| + | | TBD | ||
| + | | Armado de Satélites | ||
| + | |} | ||
| + | |||
| + | https://peru21.pe/ciencia/guatemala-descubren-mega-ciudad-maya-escondida-selva-usando-tecnologia-laser-fotos-394576 | ||
[[Category:Español]] | [[Category:Español]] | ||
| + | [[Category:Geoinquietos_México]] | ||
Latest revision as of 10:25, 19 October 2020
Platica y aprende con nosotros en: https://gitter.im/OSGeo/Lidar-es
Síntesis de referencias
Tesis de licenciatura: Diseño de un sistema LIDAR de bajo costo para generación de mapas topográficos 2005
Capítulo 1. Introducción
En este capítulo el autor explica que el objetivo de la tesis es diseñar un sistema LIDAR para obtener mapas topográficos. El sistema para tal propósito es una combinación de un GPS, un sistema de navegación inercial independiente de la aeronave y un escáner láser (el dispositivo LIDAR).
1.1 PERCEPCIÓN REMOTA
Hay una introducción a la historia de la Percepción Remota, inicia en la década de 1930 con la fotografía área utilizada con fines militares.
1.1.1 Fotografía aérea e imágenes de satélite
Desde la década de 1950 la fotografía aérea se ha perfeccionado con la creación de la fotogrametría. A partir de 1964 se comenzaron a utilizar otras plataformas, como cohetes, para transportar los sensores.
La figura 1.1 Muestra el de forma sencilla el sistema de percepción remota satelital (pág. 3).
El autor reflexiona acerca de la ventaja económica que representan contar con vehículos aéreos con cámaras fotográficas digitales sobre la percepción remota satelital.
1.1.1.1 Fotogrametría y métodos de interpretación
El proceso fotogramétrico es básicamente el siguiente:
- Fotografía aérea: las cuales deben de cumplir con estándares geométricos para poder hacer mapas a partir de ellas, además de cubrir transversal y longitudinalmente de forma secuencial todo el terreno.
- Clasificación de campo: Identificación de elementos fotografiados en campo, como: ríos, poblaciones, carreteras, etc.
- Mediciones en campo: Mediciones con equipo topográfico de elementos en campo que fueron fotografiados, con el fin de darle orientación a los componentes del mapa.
- Cálculos: Obtener, mediante cálculos y procesamientos, la ubicación geográfica de zonas dentro del mapa.
- Restitución o captura de información: Utilizando equipos llamados “restituidores”, se adquiere información geográfica como vías, ríos, etc. Para reconstruir tridimensionalmente el terreno se realiza un traslape del 60% de dos fotografías secuenciales.
- Edición y salidas finales: Colocación de letreros de sitios de interés obtenidos en campo, se añaden retícula de coordenadas, escala e información que haga comprensible e útil el mapa.
- Control de calidad: Se trata de una revisión para cerciorase del cumplimiento de normas y especificaciones técnicas del mapa.
Para contar con una ortofotografía, la cual es obtenida a través de imágenes corregidas geométricamente, compensadas y con escala uniforme en toda su extensión, también se requiere de conocer la ubicación precisa de cada toma (normalmente esto se logra con un GPS), y exige apoyo en campo (ubicación de puntos conocidos sobre el terreno y que serán comparados para corregir errores). También se requiere de un modelo digital de elevación, para compensar diferencias de escala debidas al relieve en el terreno.
1.1.1.2. Toma física de fotografías
Se requiere que las líneas de vuelo estén orientadas de tal manera que se obtengan fotografías del terreno con una sobreposición de áreas de entre fotogramas subsecuentes del 50% al 65% aproximadamente y entre líneas de vuelo del 30%. Para tal fin el eje de la cámara no puede estar más de 3 grados respecto a la línea cenit-nadir (revisar esta parte).
1.1.2 Videografía y fotografía digital de pequeño formato
Hasta el momento de la redacción de la tesis, según el autor, se ha venido incrementando el uso de la fotografía digital de pequeño formato, combinando esta tecnología con filtros de interferencia en sectores bien delimitados del espectro electromagnético.
1.2. LIDAR
LIDAR (LIgth Detection And Ranging o detección de luz para medición de distancias) es un método de percepción remota que se puede utilizar para crear modelos digitales de un terreno en estudio. Aunque el láser localizado en tierra firme puede asegurar precisiones de hasta un centímetro, al montarlo a un avión la posición de éste se convierte en un factor limitante. Para solucionar este inconveniente se requiere asociar a láser del LIDAR con tecnologías que lo hacen más preciso.
1.2.1 Funcionamiento
Un LIDAR está constituido por la integración de tres tecnologías:
- Un receptor GPS, proporciona la posición global (X,Y,Z) por medio de un sistema satelital.
- Un Sistema de Navegación Inercial (SIN), proporciona la orientación de un objeto respecto a un marco de referencia inercial, utilizando acelerómetros y giróscopos.
- Un escáner láser de lata velocidad, mide la distancia desde el escáner hasta el punto distante.
Además, una computadora que sincroniza procesa y almacena la información de los tres elementos. Así cada pulso láser tiene conocida la posición exacta del punto que golpeó en el suelo.
La figura 1.4 muestra un esquema de funcionamiento de un sistema LIDAR
1.2.2 Aplicaciones
La exploración aérea con láser compite fuertemente con la fotogrametría en las siguientes aplicaciones:
- Líneas eléctricas de potencia. Con el láser se localizan puntos sobre la catenaria y en el suelo.
- Litorales. Cartografía de los litorales.
- Zonas forestales. Para explorar el suelo y recibir múltiples retornos de los diferentes niveles del dosel, con esto se pude medir al mismo tiempo plantas y terreno, y presentarlos juntos o separados según los requerimientos.
- Pantanos y zonas minadas. Con la tecnología LIDAR no son necesarios puntos de control terrestre salvo para la estación terrestre GPS.
- Modelos urbanos. Para la medición la altura de las edificaciones.
- Batimetría. Se puede estudiar el fondo de lagos o zonas inundadas, se utiliza generalmente el láser verde porque penetra mejor en el agua.
El sistema LIDAR tiene ventajas sobre la fotogrametría debido al corto tiempo de procesamiento, su flexibilidad y eliminación de cobertura con estereo-imágenes.
1.3 SISTEMA LÁSER
En el LASER (Light Amplification by Stimulated Emission of Radiation) las longitudes de onda de la radiación incluyen las regiones ultravioleta (180 y 400 [nm]), visible (400 y 700 [nm]) e infrarroja 700 [nm] y 1 [mm]. Los rayos láser pueden ser producidos por efectos fotoquímicos, térmicos o mecánicos.
Los sistemas LIDAR emiten un pulso de luz cuyo reflejo sobre los objetos es detectado por un sensor y almacenado. El receptor capta el retorno antes de la emisión del siguiente pulso.
La divergencia de un rayo láser es baja así que el ancho del pulso es constante por más tiempo y de igual forma su potencia.
1.4 SISTEMA DE POSICIONAMIENTO GLOBAL (GPS)
En 1978 el Departamento de Defensa de los Estados Unidos decide implementar el Sistema de Posicionamiento Global (GPS). Compuesto por 24 satélites con capacidad de realizar medidas con menos de un centímetro de precisión.
1.4.1 GPS Diferencial
Es un método para corregir los errores en el sistema GPS básico, elevando significativamente su precisión. Este método se vale de la utilización de dos receptores: el de referencia (estacionario y del cual se conoce exactamente su posición) y el móvil (el receptor del cual se quiere saber su posición).
Los receptores requieren de recibir señales de sincronización de al menos cuatro satélites para establecer su posición. Estas señales tienen un pequeño retraso debido a los obstáculos que se encuentren en su camino. Las señales sincronizadas tienen un pequeño error, por lo tanto la posición calculada a partir de ellas tendrá una composición de esos errores. Con el GPS diferencial contamos con un receptor de referencia que mide los errores de sincronización. Este receptor transmite mensajes de corrección hacia los receptores de alrededor.
El receptor de referencia recibe la misma información que los receptores móviles, pero utiliza el conocimiento de su posición para calcular cuál debería ser el tiempo de viaje de las señales y lo compara con la sincronización de las señales que recibe. La diferencia en tiempo da pie al cálculo de un mensaje de corrección, que luego transmite hacia posibles receptores móviles para corregir sus mediciones.
1.4.2 WAAS
El WAAS (Wide Area Augmentation System) es un sistema desarrollado por la Administración Federal de la Aviación y el Departamento de Transporte de los Estados Unidos. Está compuesto por un sistema de satélites y 25 estaciones terrestres, provee correcciones a la señal GPS, mejorando hasta 5 veces la precisión de la posición calculada. Un receptor que con capacidad de recibir esta información puede dar una precisión de menos de tres metros el 95 % del tiempo sin pago por cuotas de servicio. El objetivo es corregir los errores de las señales GPS causadas por la ionósfera y sincronización de errores orbitales.
1.5 SISTEMAS DE NAVEGACIÓN INERCIAL (SIN)
Para navegar, es decir dirigir un vehículo de un lugar a otro, se requieren saber casi en cualquier momento de la posición y la velocidad del vehículo. A partir de estos dos datos podremos conocer el rumbo y modificarlo para llegar al punto deseado. Si conocemos los valores iniciales de posición y la velocidad podemos utilizar instrumentos que miden la aceleración lineal (acelerómetros) y la aceleración angular (giróscopos) y así calcular en cada momento la localización del vehículo.
Un Sistema de Navegación Inercial (SIN) es básicamente un arreglo de sensores (giróscopos y acelerómetros) fijos a un marco de referencia, esto es, tres ejes mutuamente perpendiculares que además coinciden con los ejes del vehículo.
Un ejemplo de un sistema de orientación sería:
- Tres giróscopos, que miden la variación de la aceleración angular alrededor de tres los ejes
- Tres acelerómetros, que miden la aceleración lineal del vehículo a lo largo de los mismos tres ejes.
Para localizar el vehículo debemos contar con la posición inicial del vehículo respecto a un marco de referencia fijo (en Tierra). Luego los valores de orientación obtenidos por los sensores deben multiplicarse por una matriz de rotación y así obtener la orientación del vehículo respecto al marco de referencia fijo (en Tierra).
Ver figura 1.9 Diagrama de bloques simplificado de un sistema de navegación inercial. Página 13.
Figura_1_09.jpg|Diagrama de bloques simplificado de un sistema de navegación inercial. 1.5.1. Principios de funcionamiento
Los sensores inerciales (giróscopo y acelerómetro) hacen uso de las leyes de Newton (en este caso la ley de la inercia): un objeto que se mueve en una dirección tiende a permanecer en movimiento en la misma dirección y un objeto que gira alrededor de un eje tiende a mantener el mismo eje de rotación. Este caso se ejemplifica con un trompo girando sobre un eje vertical, si se golpe al trompo éste se desviará, pero intentará volver a recobrar el eje de giro que tenía antes del impacto.
Imaginemos un vehículo con un eje longitudinal y otro trasversal (estos ejes formarían un plano paralelo al horizonte). Y en él colocamos un giróscopo, el cual consiste en un marco con dos ejes longitudinal y transversal propios, que coinciden con los ejes del vehículo. (Ver Figura 1.10. Giróscopo con partes móviles). El marco está en equilibrio al ser sostenido por dos pivotes sobre el eje longitudinal, colineal con el eje longitudinal del planeador o vehículo. Además, hay una masa gira libremente al rededor del eje trasversal, el cuál es paralelo y/o colineal con el eje transversal del mismo vehículo.
Debido a la fuerza de gravedad, un que gira cerca de la vertical se orientarán hacia la vertical verdadera. Si el vehículo se ladea, esto es, solo el eje longitudinal permanece paralelo al horizonte y el eje trasversal no, como cuando el planeador o avión da vuelta, el mecanismo se inclinará o ladeará junto con el vehículo, pero la masa giratoria permanecerá vertical, es en ese momento cuando se puede medir la velocidad angular de ese eje transversal. En la figura pude verse un resorte que podría servir para medir esa inclinación.
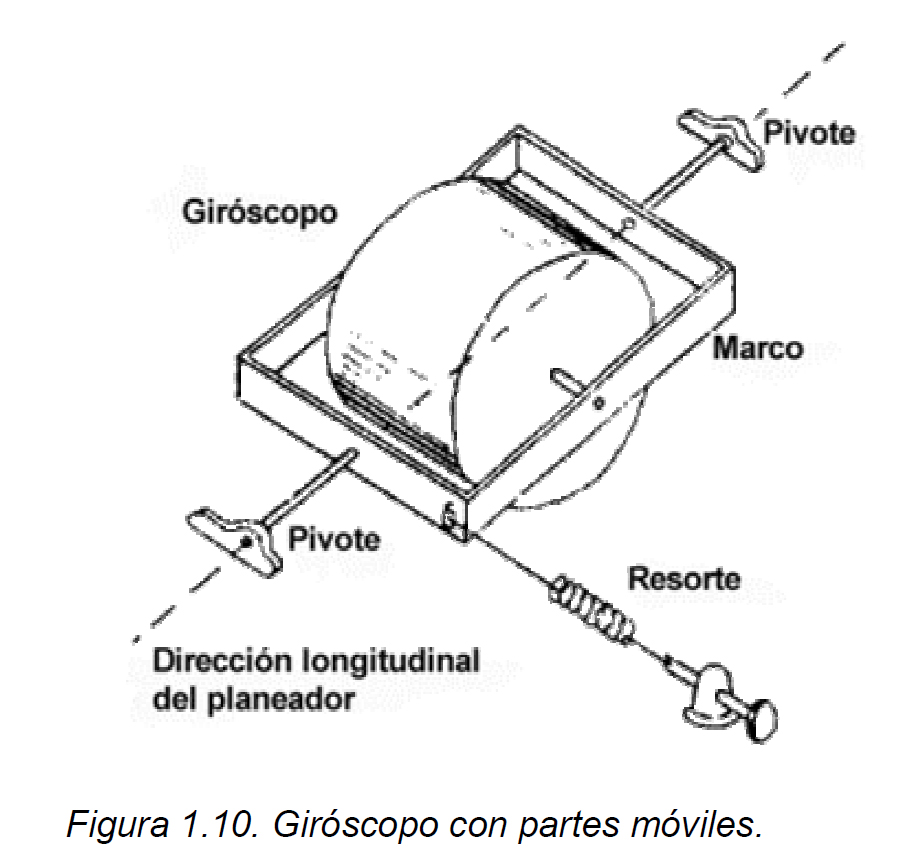
Giróscopo con partes móviles.

Figura 1.10. Giróscopo con partes móviles.
El acelerómetro mecánico simple (ver Figura 1.11) se construye uniendo una masa a un dinamómetro cuyo eje está en la misma dirección que la aceleración que se desea medir. La aceleración que puede medirse puede ser debido al cambio de la velocidad del dispositivo en el espacio, pero también debida al tipo de aceleración asociada con el fenómeno del peso experimentado por una masa de prueba que se encuentra en el marco de referencia del dispositivo. Un ejemplo en el que este tipo de aceleraciones son diferentes es cuando un acelerómetro medirá un valor sentado en el suelo, ya que las masas tienen un peso, a pesar de que no hay cambio de velocidad. Sin embargo, un acelerómetro en caída gravitacional libre hacia el centro de la Tierra medirá un valor de cero, ya que, a pesar de que su velocidad es cada vez mayor, está en un marco de referencia en el que no tiene peso.(Extracto obtenido del tema "acelerómetro" en Wikipedia).
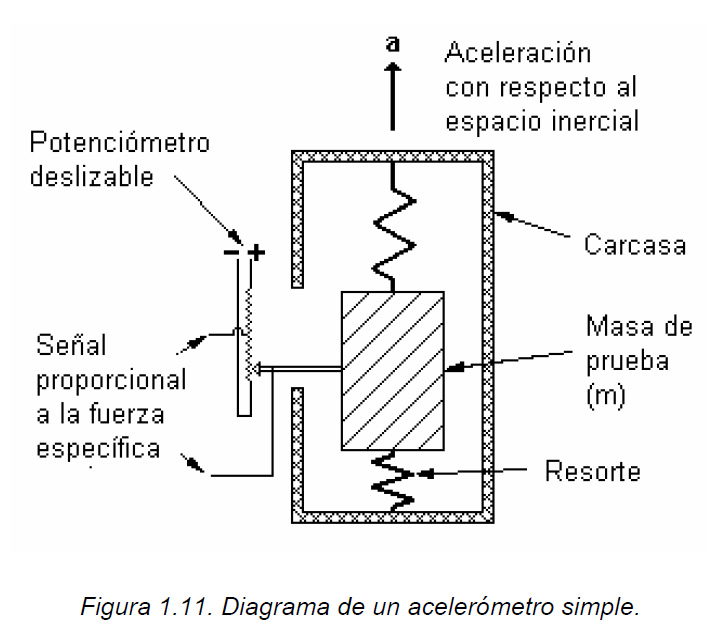
Diagrama de un acelerómetro simple.

Figura 1.11. Diagrama de un acelerómetro simple.
1.5.2 Plataformas aéreas
Las plataformas aéreas sujetan una cámara o sensor al vehículo aéreo.
Idealmente, el eje focal de la cámara al adquirir las imágenes en un vuelo es normal al plano del terreno (horizonte) con el fin de que toda la foto esté a la misma escala y no haya que aplicar correcciones, sin embargo, esta práctica es difícil de lograr debido a las perturbaciones del avión al volar. Por tal motivo se han diseñado plataformas autónomas que, además de permitir que el eje de la cámara sea normal al terreno, están provistas de dispositivos de amortiguamiento para evitar la transmisión de la vibración del avión a la cámara y, cuentan con mecanismos para que la cámara pueda rotar en el azimut y así corregir la deriva (fenómeno causado por los vientos laterales).
Estas plataformas son utilizadas para estabilizar cámaras analógicas o digitales de gran formato, pero igualmente pueden utilizarse para cualquier otro sensor, como es el caso un sistema LIDAR. Es de suma importancia medir los ángulos en el momento de la adquisición de imágenes, para poder efectuar la corrección geométrica reconstruyendo los parámetros de orientación de la cámara al momento de la toma. Y esta información la obtendremos del sistema de navegación inercial en los tres ejes de rotación, para saber exactamente hacia donde estaba apuntado la aeronave al momento de la emisión de un pulso laser determinado y así poder reconstruir la forma del terreno en estudio. (Ver Figura 1.13)
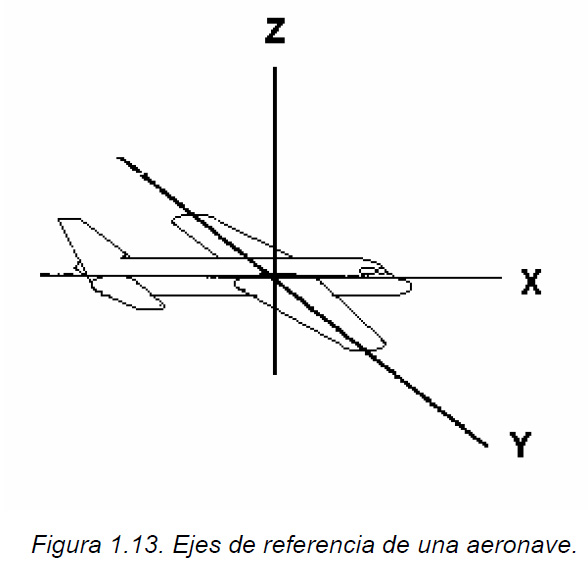
Ejes de referencia de un areonave.

Figura 1.13. Ejes de referencia de un areonave.
Capítulo 2. PARTES QUE COMPONEN UN SISTEMA LIDAR
2.1. ESCÁNER LÁSER
2.1.1 Principios básicos de láser
2.1.2. Tipos de láser
2.1.3. Clasificación y seguridad en los equipos láser
2.1.4. Medición de distancia con luz láser en un LIDAR
2.2. SISTEMA GPS
2.2.1 Organización del Sistema de Posicionamiento Global
2.2.1.1. Segmento Espacial
2.2.1.2. Segmento de Control
2.2.1.3. Segmento de Usuario
2.2.2. Triangulación y posicionamiento
2.2.3. sistema de coordenadas geodésicas
2.2.4. Señales manejadas por el GPS
2.2.5. El código NMEA
2.3. SISTEMA DE NAVECACIÓN INERCIAL (SIN)
2.3.1. Marco inercial y sistema de coordenadas fijo a la plataforma
2.3.2. Sensores inerciales
2.3.2.1. Acelerómetros
2.3.2.1.1 Acelerómetros de estado sólido
2.3.2.2. Giróscopos
2.3.2.2.1. Giróscopo vertical
2.3.2.2.1. Giróscopos de estado sólido
2.3.2.2.2. Giróscopos láser
Resumen del Video "Photogrammetry - 3D scan with just your phone/camera" traducido por Vicky Vergara
https://www.youtube.com/watch?v=ye-C-OOFsX8
Fotogrametría
Escaneo 3D con cámara de celular
La mayoría de nosotros no tenemos acceso a escáners 3d porque pueden ser bastante caros y además limitados respecto al tamaño de los objetos a escanear.
Para fotogrametría lo unico que se necesita es una cámara y una PC de potencia razonable.
Antes de empezar a tomar fotografías, coloca el objeto de manera que todos los lados puedan iluminados igualmente, evitando crear sombras muy pronunciadas. Rodea el objeto fotografiando todos los ángulos posibles, incluyendo las partes superior e inferior del objeto.
El objeto no debe moverse entre cada toma, ya que el software de fotogrametría buscará características no sólo en el objeto, sino también en el fondo así que las diferencias pueden confundirlo.
Existen muchas opciones en términos de software, sin embargo algunas de ellas son muy caras o limitadas en la versión libre.
En este caso usaremos Colmap, disponible para Windows, Linux y Mac. Para Windows y Mac, se pueden descargar los binarios pre-construidos. En Windows, se encontrarán dos archivos batch dentro de la carpeta descargada: uno de ellos verifica la máquina y confirma que todo está listo para ejecutar Colmap, el otro va a arrancar la aplicación.
- Prepara 2 folders: uno de ellos debe incluir todas tus fotos, el otro será usado como directorio de salida.
- En el menú de Colmap, seleccionar "Reconstruction" -> "Automatic reconstruction".
- Configura el worspace folder, que es el directorio de salida, y el image folder, que es aquél donde has guardado todas tus fotos.
- Cambia la calidad a "Medium" y presiona "Run"
- Esto puede llevar unos minutos, sobre todo si tomaste muchas fotos.
- Colmap mostrará las posiciones estimadas de la cámara y un preview de los puntos del objeto rastreado.
Una vez terminado este proceso en Colmap, podemos crear una retícula imprimible, para lo que usaremos Meshlab.
- Importa el archivo fused.ply, que encontrarás en el directorio de salida de Colmap.
- Vamos a importar desde el directorio de salida de Colmap, donde se guarda la reconstrucción, el archivo fused.ply. Ahora podemos ver todos los puntos de la reconstrucción.
- Mantendremos sólo los puntos del objeto en cuestión y eliminaremos todo lo demás. En el ejemplo, los otros puntos de contraste son las carecterísticas del cuarto donde tomamos las fotografías.
- Utilicemos el ícono "Seleccionar vértices" en la barra de herramientas y seleccionemos puntos que queremos borrar utilizando la tecla control, después hagamos click en el ícono "Eliminar los vértices". Repetir este proceso hasta quedarnos básicamente sólo con los puntos del modelo que vamos a reconstruir.
- Seleccionamos en el menú "Filters" -> "Remeshing" --> "Screened poisson surface reconstruction".
- Cambiemos la profundidad de la reconstrucción a un valor entre 10 y 15. Pulsa "Apply". Esto tardará un poco en procesar.
- Puedes alternar la visibilidad de los objetos con el ícono de "Ojo" en la esquina superior derecha.
- Si aún luce muy áspero, puedes incrementar el valor de la profundidad de reconstrucción. Entre más alto es el valor, más tiempo tomará hacer la reconstrucción. Llegará un punto, sobre todo arriba del valor 15, en que ya no se podrán obtener mayores detalles.
- Para deshacerse de la forma extraña generada en la parte inferior del modelo, seleccionaremos en el menú la opción "Filters" -> "Selección" --> "Select faces with edges longer than".
- Alterna la vista previa y ajusta el umbral de límite de valores (Edge thresold) hasta cubrir la mayoría de las superficies que quieres eliminar y que están seleccionadas, porque las que quieres conservar NO deben estarlo.
- Después usa el ícono "eliminar superficies" del menú principal.
- Puedes usar la herramienta "seleccionar superficies" de la misma manera que la herramienta "seleccionar vértices" para ir borrando lo innecesario del modelo.
- Puedes suavizar el modelo utilizando el Suavizamiento Laplaciano: en el menú "Filters" -> "Smoothing, fairing and deformation" --> "Laplacian smooth"
- Introduce el valor de suavizamiento deseado (Smoothing steps): usualmente funcionan bien entre 8 y 20. Ten cuidado de suavizar demasiado, se pueden perder detalles valiosos del modelo.
- Ahora estamos listos para exportar la malla (mesh).
- Utiliza PLY o 3DS si quieres mantener mantener la textura, por ejemplo, para publicar el achivo en línea.
- Utiliza STL si sólo deseas salvar la geometría del modelo.
Hacer fotogrametría en objetos brillantes o transparentes es engorroso: puedes pintar o colocarle maskin tape al objeto para darle una apariencia matte y texturizada, de otra forma la reconstruccion no va a ser exitosa.
Las estatuas de piedra son perfectas para fotogrametría, la superficie es áspera y no emiten ninguna reflexión de luz y tienen muchas características pequeñas, que pueden rastrearse y reconstruirse.
El modelo casi siempre va a terminar con un hoyo en la parte inferior, pero es fácil arreglar esto, por ejemplo en Meshmixer, y en ese caso, es mejor cortar el soporte y crear una superficie perfecta para colocar el miodelo en la cama de impresión (revisar antiguos tutoriales sobre Meshmixer).
Estamos listos para rebanar e imprimir nuestro modelo :)
Instalación de OpenDroneMap
referencias
| liga | tema | idioma | nivel | comentarios |
|---|---|---|---|---|
| https://www.youtube.com/watch?v=ye-C-OOFsX8 | Fotogrametría | en | -- | -- |
| https://www.youtube.com/watch?v=Fj0TO4ZKEc0 | Fotogrametría y Lidar | en | intermedio | Video titulado "GRASS GIS A Point Cloud (LiDAR) Evaluation Resource" |
| https://www.youtube.com/watch?v=ELHOjC_V-FE&t=4s | Fotogrametría | en | básico | Presentación de alunas herramientas para obtener modelos 3D desde un conjunto de fotografías |
| http://oreon.dgbiblio.unam.mx/F/IJINDKD554A829XGH26JGLQRS58PCBG8BF6LJRGIUI8GC7GDRG-54726?func=full-set-set&set_number=007762&set_entry=000004&format=999 | Lidar | es | intermedio | Tesis de licenciatura: Diseño de un sistema LIDAR de bajo costo para generación de mapas topográficos 2005 |
| https://www.youtube.com/watch?v=ye-C-OOFsX8 | fotogrametría | en | básico | Video titulado "Photogrammetry - 3D scan with just your phone/camera" |
| https://rapidlasso.com/blog/ | Lidar y Fotogrametría | en | intermedio | Blog de la herramienta Lastools con ejemplos de uso reales |
| https://pdal.io/ | Lidar | en | intermedio | Sitio web de PDAL con muchos ejemplos prácticos y con datos de muestra para el manejo de nubes de puntos |
| http://ulisesmartin.com/2017/04/caminando-hacia-un-dtm-con-software-libre-1/ | fotogrametría | es | básico | Entrada al blog de Ulimaps sobre obtención de suelo desnudo a partir de una nube de puntos con Lastools |
| https://www.asprs.org/divisions-committees/lidar-division/laser-las-file-format-exchange-activities | Formatos de archivos | en | intermedio | Especificaciones del formato de archivos "LAS" por la "American Society for Photogrammetry and Remote Sensing (ASPRS)" |
| https://idecor.cba.gov.ar/satelites-de-10x10-cm-videos-en-linea-y-comprar-los-componentes-para-armar-tu-propio-satelite-actualidad-o-futuro/ | Formatos de archivos | es | TBD | Armado de Satélites |